货物盗窃已达到转折点。美国和加拿大货运网络的损失目前每年超过 350 亿美元(CargoNet 2024),事件同比激增 57%,平均损失通常超过 58 万美元。变化最大的是威胁的性质:物理劫持已让位于数字欺诈、虚假 carrier 身份以及利用 carrier 审查漏洞的中途转运。
市场正在做出反应,2025 年风险缓解软件支出同比增长约 18%,但盲点依然存在。虚假身份、中途移交和违规进入制裁路线的情况在即使经过严格审查的网络中也时有发生。project44 具有独特的优势,通过将位置和合规信号连接到实时风险情报层来弥补这些差距,使 shipper 能够在威胁出现时立即进行检测、预防和响应。
运动中威胁的最早且最可靠的信号是卡车停止按预期行驶——它偏离了计划路线、异常停留,或者在没有取得进展的情况下摆动,这正是路线偏离检测旨在捕捉的情况。
什么是路线偏离,以及为什么它对预防欺诈至关重要
路线偏离是指货物在提货和送货之间的预期路线或时间线上发生偏离。在实践中,这些信号与欺诈和盗窃模式、错过里程碑以及连锁的预计到达时间 (ETA) 不准确相关。通过将偏离提升为一级异常,shipper 可以在损失发生前触发预案,例如联系 carrier、派遣安保人员或重新调度资产。
我们如何检测异常?
在 project44,我们每天为追踪的货物接收超过 300 万个 GPS 信号。在全球范围内,我们每天追踪超过 50,000 批货物,其中大多数遵循预期的提货和卸货预约时间及轨迹。在这些数据中寻找欺诈模式无异于大海捞针。除了规模庞大之外,我们预先并不知道这些欺诈模式是什么样的,也无法获得已标记的确认正常或异常货物的训练数据集。
鉴于缺乏标记数据,无监督学习方法已成为获取洞察和发现模式的必然选择。我们选择了孤立森林(Isolation Forest)算法,该算法利用异常评分来识别最显著的异常数据点。该算法具有线性时间复杂度,使其在模型训练和推理阶段均表现出极高的效率。
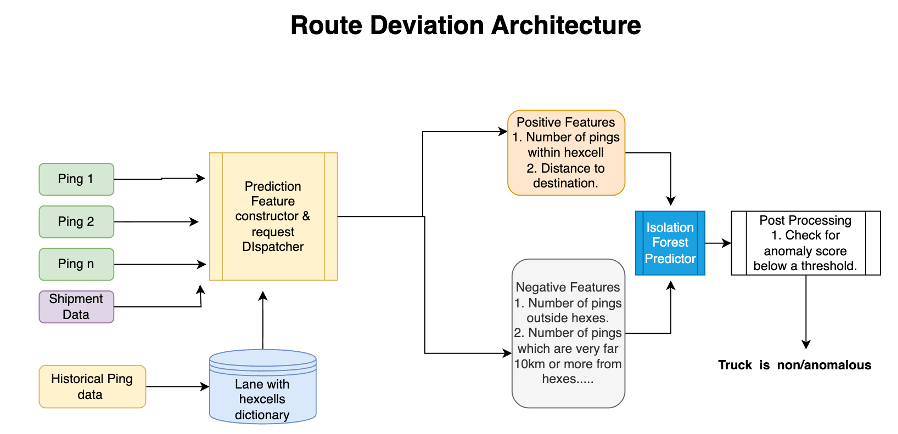
检测引擎的工作原理
货物生成的每个 GPS 信号都会针对两个模型进行实时评估:
- 距离偏离:测量卡车偏离预期路线的程度
- 时间偏离:标记卡车仍在路线上时的异常进度模式,例如往返运动、向起点倒退或缺乏前进运动。
每个信号都会获得一个异常评分。后处理随后将这些评分与领域规则(最小连续异常信号数、距离路线阈值以及速度/倒退检查)相结合,以产生货物级别的决策并提出具有可解释性的异常。
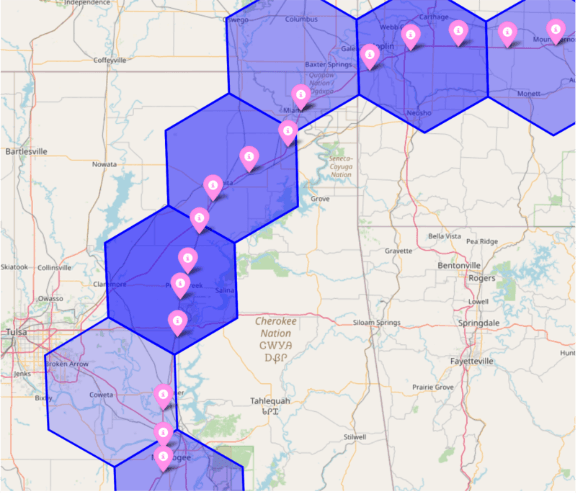
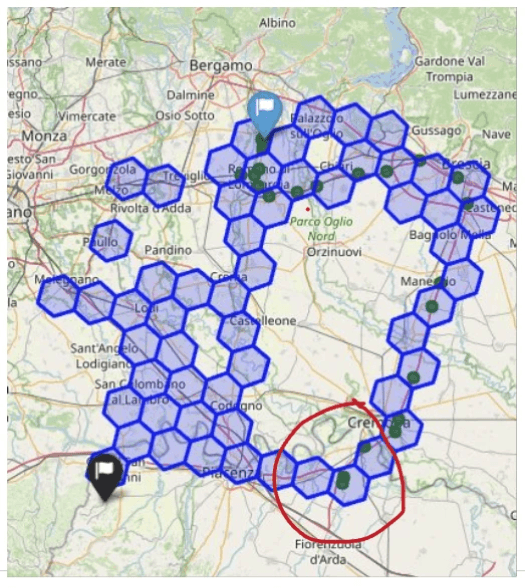
构建正常地图:带有 hexcell 的参考路线
预期路线被编码为 hexcell 路线,它将路线划分为小的地理空间瓦片,这些瓦片共同定义了给定起讫点对的正常路径。这些路线是根据历史货物数据构建的,并作为系统衡量每个实时信号的基准。客户还可以贡献自己的货物历史记录,以构建针对其货运网络的定制基准。我们已经绘制了超过 100 万条路线,为构建和扩展这些模型提供了坚实的基础。
系统监控的欺诈信号
并非所有偏离看起来都一样。系统会标记三种不同的模式:
- 快速路线偏离:未经授权的绕道或偏离路线活动的早期迹象
- 路线上持续停留或摆动:潜在的集结或偷窃行为,虽然没有脱离路线但停滞了进度
- 未能完成轨迹:剩余时间或距离不足以到达目的地,标记未交付风险
端到端的工作原理
每个 GPS 信号都会流向偏离服务,两个孤立森林模型会独立对其进行基于距离和时间的异常评分。这些评分通过校准阈值和连续信号护栏进行过滤以抑制噪声,一旦确认偏离,异常就会发布到平台,并附带位置、时间戳、类型和严重程度,以便立即采取行动。
幕后:模型是如何构建和调优的
数据集构建
我们在北美和欧洲的超过 100,000 批货物和 500 万个信号上进行了训练,所有数据均未标记。在没有地面真值的情况下,我们通过应用初始阈值评分、目视检查标记案例并将抽样的偏离路由到标注团队来进行引导。他们的反馈迭代地塑造了我们的黄金验证集,并推动了阈值的精细化。
特征工程
对于每个 GPS 信号,系统会评估一系列信号:卡车偏离预期路径的距离、其速度或运动模式是否看起来异常、是否取得了实质性的前进进展,以及时间是否与该路线的典型情况一致。两个独立的模型分别处理距离和时间信号,保持每个模型的专注和精确。
后处理保障措施
该系统旨在仅在确实存在疑虑时才发出警报。警报仅在连续出现多个可疑信号后才会触发,而不仅仅是一个,从而减少了将休息站或轻微绕道等普通事件标记为异常的机会。阈值根据每条路线的特征进行校准,因此“异常”的标准反映了该特定路线的正常情况。
评估
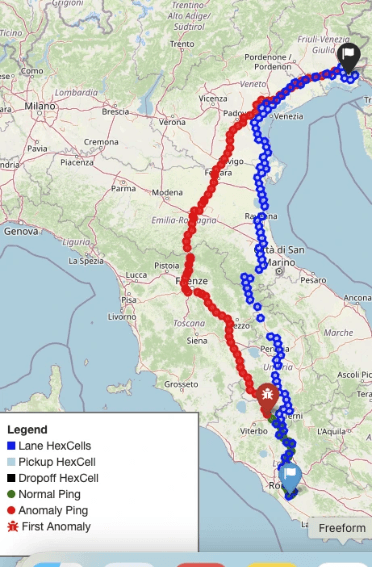
在没有标记地面真值的情况下,我们构建了一个基于可观察结果的自定义评估框架。两条基于里程碑的规则锚定了这一方法:从未登记到达目的地的卡车是明显的偏离,而在触发警报后显著延迟到达的卡车则证实了模型捕捉到了真实的延迟或绕道。
然而,大多数标记的案例并不完全属于这两类。为了验证这些案例,我们构建了基于 Folium 的地图可视化,叠加了基准路线、实时信号和模型输出,从而可以目视检查每个案例并建立对系统判断的信心。
路线偏离检测系统现已正式上线,通过可扩展的 FastAPI/GKE 流水线每天处理数百万个 GPS 信号,并将实时欺诈警报和风险路线洞察直接呈现给客户。
从检测到行动
我们将把路线偏离检测与 AI 驱动的代理工作流集成,代理将根据这些信息联系 carrier 或客户,并确定下一步行动方案。异常会在平台上的货物级别提出,偏离的位置和时间戳会在 UI 中突出显示,以便预防未来的事件。欺诈企图通常在任何里程碑失败之前就操纵了路线。通过持续根据受信任的路线和进度规范对实时遥测数据进行评分,系统可以在偏离开始时就将其暴露出来,从而实现立即升级。其结果是减少损失、在事件发生时更快恢复,并显著提高交付可靠性。
结论与后续步骤
通过这项工作,我们在 project44 实施了第一个欺诈检测系统,目前正在向多个客户推广此功能。carrier 可以联系卡车司机采取必要行动。未来的工作包括处理实时新闻动态,以进一步识别风险区域并实现先发制人的行动。随着欺诈规模的扩大,目前对偏离的手动评估将变得不足,需要自动化流水线。目前,可视化结果是手动检查的,这个验证过程非常耗时。我们正在训练一种基于代理 LLM 的方法,用于自动生成标签和解释偏离。我们很快将分享关于该项工作的专门技术深度解析。